
在印刷机械行业中,多电机的同步操控是一个十分重要的问题。因为印刷产品的特别工艺要求,尤其是关于多色印刷,为了确保印刷套印精度(一般≤0.05mm),要求各个电机方位转差率很高(一般≤0.02%)。在传统的印刷机械中,以往大都选用以机械长轴作为动力源的同步操控计划,但机械长轴同步操控计划易呈现振动现象,各个机组彼此搅扰,并且体系中有许多机械零件,不便利体系维护和运用。跟着机电一体化技能的开展,现场总线技能不断运用到各个范畴并得到了广泛的运用。本文针对机组式印刷机械的同步需求,提出了一种依据CAN现场总线的同步操控解决计划,并得以验证。
机组式卷筒印刷机一般由给纸机组、印刷机组、张力机组、加工机组和复卷机组等机组组成。在传统的有轴传动印刷机中,动力源由异步电机经过皮带轮带动一根机械长轴(约10-20m),然后经过长轴带动各机组的齿轮、凸轮、连杆等传动元件,再经过传动元件带动设备的履行元件完结设备的输人、输出使命。
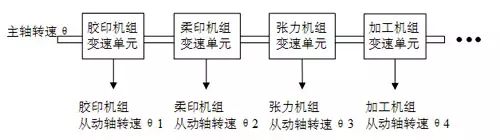
卷筒印刷机要求印刷速度为300m/min,套印精度≤0.03mm,为了满意套印精度,要求在各个机组定位精度≤0.03mm。在印刷机印刷过程中,要求各机组轴与机械长轴坚持必定的同步运动联系,能否很好的完结各个机组轴的同步联系,将直接影响到印刷速度、套印精度等。其间,给纸机组、印刷机组要求与主轴滚动速度成必定的比例联系,张力机组依据不同的印刷速度调整张力系数,加工机组需求与主轴坚持凸轮运动联系,而复卷机组的运动规则,要求跟着纸卷直径的增大而减小。
咱们把机械长轴作为主轴(参阅轴),各印刷机组轴为从动轴,如图1,各从动轴与主轴要满意同步联系θ1=f1(θ) ,θ2=f2(θ) ,θ3=f3(θ) ··· ,其间,θ为主轴方位转角,θ1、θ2、θ3···为从动轴方位转角。
考虑到印刷机中同步运动联系杂乱,套印精度高、印刷机组点多、涣散,多操作子站,印刷出产线长等特色,选用全涣散、全数字、全敞开的现场总线操控体系FCS,总线的挑选选用CAN总线。
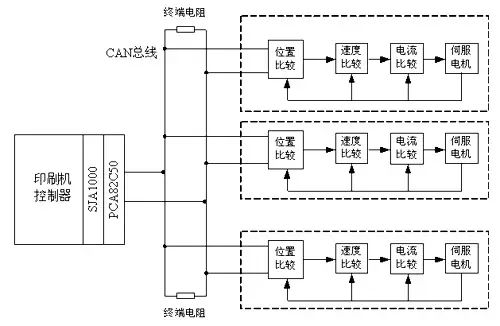
为了完结各个印刷机组的杂乱同步联系,将主操控器和各个电机的伺服驱动器都挂接到CAN总线上,构成以印刷机操控器为中心的CAN现场总线。
操控器和伺服驱动器都配有CAN总线的通讯适配卡,经过连接在印刷机操控器上的CAN通讯适配卡,操控器能够便利、快速的与各伺服驱动器通讯,向各个伺服单元发送操控指令和方位给定指令,并实时取得各个伺服电机的状况信息,依照需求实时地对伺服参数进行修正,各个伺服单元也能够经过CAN总线及时的进行数据交换。各个伺服驱动器在取得自己的方位参阅指令后,严密的跟从方位指令。因为操控器的方位指令直接输入到各个伺服驱动器,因而每个伺服驱动器都取得同步运动操控指令,不受其他要素影响,即任一伺服单元都不受其他伺服单元的扰动影响。在这个体系中,操控器和各个伺服驱动器都作为一个网络节点,构成CAN操控网络。一起,因为选用现场总线操控体系,能够依据印刷规划,扩展网络节点个数。
在大惯量负载印刷体系中,编码器和伺服体系的挑选尤为重要。以BF4250卷筒纸印刷机为例,其负载滚动惯量很大,其间柔印机组为0.13 kg·m2,胶印机组滚动惯量最大,为0.33 kg·m2。
因为体系定位精度要求≤0.03mm,考虑到负载的大惯量性,把操控周期定为2ms,要求方位环稳态差错为±1个脉冲。依据定位精度和稳态差错,能够折算出编码器线线,但是考虑到在实践印刷过程中,要不断调整不同机组的方位,假如编码器分辨率选17000线,在调整印辊时,因为机组滚动惯量很大,将会发生很大的角加速度,然后发生很大的转矩。例如关于胶印机组,调整角加速度超越700 rad/s2,调整转矩超越200N·m,一般的电机无法满意要求。
归纳考虑,挑选编码器分辨率为40000线,这样在调整过程中,减小了电机的调整加速度,然后减小了调整转矩。例如在负载惯量最大的胶印机组中,调整角加速度为78.6rad/s2,调整转矩为26 N·m,凯奇电气公司的90M系列伺服电机完全能够满意要求。
在散布式无轴传动同步操控体系中,需求各个印刷机组之间一致和谐地作业,所以各个机组有必要要有一致的时刻体系,以确保各个印刷机组和谐作业,完结印刷使命。
详细的时钟同步完结办法分为硬件时钟同步,同步报文授时同步和协议授时同步。
(1)硬件时钟同步。硬件时钟同步是指运用必定的硬件设备(如GPS接收机、UTC接收机、专用的时钟信号线路等)进行的部分时钟之间的同步,操作目标是核算机的硬件时钟。硬件同步能够取得很高的同步精度(一般为10-9 秒至10-6秒)。
(2)同步报文授时同步。在每个通讯周期开端,主站以播送办法发送一次同步报文。例如在SERCOS协议数据传输层中,每个SERCOS的通讯周期开端都以主战发送的同步报文MST为标志。MST的数据域十分短,只占1个字节。MST报文的同步精度很高,假如用光缆做传输介质,同步精度可在4奇妙之内。
(3)协议授时同步。协议授时也叫软件授时,指运用网络将主时钟源,经过网络,发给其他的子体系,以到达整个体系的时刻同步性。经过核算从宣布主时钟信息到发送到方针节点接受该信息并发生中止之间的时刻差,能够得出推迟时刻。然后经过延时补偿来到达时刻同步。软件授时本钱低,可因为同步信息在网络上传输的推迟大且有很大的不确定性,所以授时精度低(一般为10-6秒到10-3秒)。
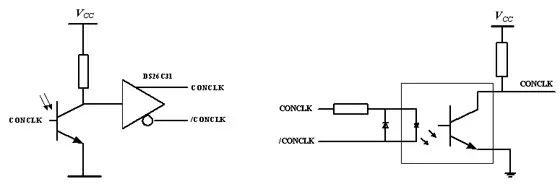
归纳考虑,本文的时钟同步计划选用的是硬件时钟同步,各节点依据体系中指定的主时钟来调整它们的时钟,详细完结办法是:增加硬件时钟同步信号线CONCLK用来传输时刻同步信号,同步操控信号周期为2ms,以同步信号的上升沿作为同步点。在操控器中设置同步信号发生器,并在各个驱动器内部设置同步接受单元。驱动器从站的同步接受单元检测到主战的CONCLK上升沿后,各从站时钟一起清零。这样守时清零不只坚持了各从站时钟的一致性,一起也避免了同步差错的累计。为了进步模块同步信号的抗搅扰才能,选用平衡差分驱动办法传输同步信号。运用光耦阻隔,能够使主站和从站的信号互不搅扰。主、从站同步信号电路如图3。
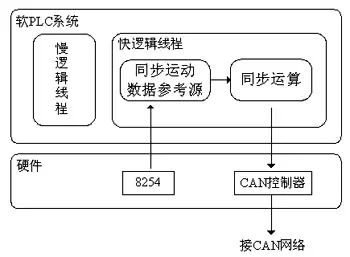
同步运动数据的发生使命放在到北京首科凯奇电气技能有限公司开发的软PLC-ComacPLC体系中。该公司的软PLC体系,硬件体系选用的是工业核算机渠道,操作体系选用的是微软推出的WinCE嵌入式操作体系。在此软PLC体系中,树立了快逻辑使命和慢逻辑使命,快逻辑用于对时刻要求高的场合,如紧急状况处理,高精度采样等状况,慢逻辑使命首要用于一般对时刻要求不高的场合。快逻辑使命是一个需求守时履行的使命(类似于中止服务程序),该使命有必要在一个体系采样周期内履行完结,慢逻辑使命是一个无限循环,它能够在几个体系采样周期内完结[2]。快逻辑使命经过守时操控器8254来完结守时,守时周期为1毫秒。在履行过程中每一次采样周期都履行一次快逻辑使命,发生成同步运动数据。为了坚持各个从动轴相关于主轴的同步联系,树立运动参阅数据源来虚拟主轴运动状况。在每个体系采样周期中,依据虚拟主轴的运动状况,以及各个从动轴的同步运动要求,别离核算各个从动轴的方位信息,发生各个从动轴的同步运动数据,放入CAN操控器的发送行列等候发送,如图4。把运动数据发生和运算使命放在快逻辑使命中,确保发生运动数据的实时性。
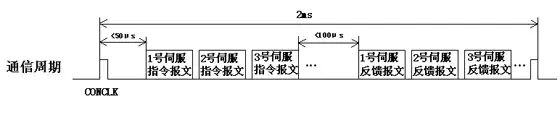
本体系总线Mbps,位传输时刻τbit为1×10-6秒。每个数据帧由8个字节组成,发送报文数据帧长度固定为131位(29位标识符),反应报文长度为99位。数据帧传送时刻Cm=131μs。把同步操控信号线CONCLK,作为同步周期信号线和报文的基准信号线ms,高电平有用,信号电平宽度为10。正常通讯时,一个操控周期内CAN网络能够传送16个同步数据报文。操控器在CONCLK 上跳沿之后50μs内宣布指令报文,驱动器在接受到指令报文后100微秒内宣布反应报文。指令报文内容包含方位指令值、逻辑接口信号输入,其间方位指令占用4个字节(32位),逻辑接口信号输入占用一个字节。逻辑接口信号输入包含驱动器使能、复位等指令。在反应报文中,包含伺服运转状况信息和毛病信息,通讯时序如图5。
本文针对传统的机械长轴印刷机同步操控体系,提出了以操控器为中心的现场总线操控体系,以CAN现场总线完结在操控器和伺服之间的通讯。此计划不只克服了传统机械长轴操控计划的各种机械元件带来的缺陷,并且还具有同步功用好、各伺服单元不彼此搅扰、操控精度高、维护便利等长处。
这种办法完结同步的特色在于运用了CAN总线牢靠性高、传输时刻短、抗搅扰才能强,和数字伺服的方位精度高、全闭环的长处。
摘要: TPS5120是美国TI公司研发的双输出同步降压DC-DC操控器,它在轻载时可由PWM方式切换至SKIP方式以进步其转化功率。文中介绍了TPS5120的首要功用和参数,给出了依据TPS5120操控器的双路输出DC-DC电源电路和首要规划办法。 关键词: 同步降压 DC-DC操控器 TPS5120 1 导言 TPS5120是一款新颖的双输出高功率同步降压DC-DC操控器,在轻负载时,它可由PWM方式切换至SKIP方式,其意图是下降运转作业频率、缩小低端MOSFET的导通时刻,以进步轻负载条件下的转化功率。TPS5120的在片1.5A驱动电路可直接驱动低本钱N沟道MOSFET;其内部
摘要:介绍了一种选用DSP芯片TMS320LF2407A完结永磁同步电机磁场定向操控器的操控原理,给出了选用磁场定向操控战略来规划该操控器的硬件组成结构及软件规划流程。 关键词:永磁同步电机 磁场定向操控 数据信号处理器 智能功率模块 1 导言 近年,沟通伺服体系已经在机械制造、工业机器人、航空航天等范畴得到广泛运用,其操控目标大多是永磁感应同步电动机(PMSM)。PMSM的转子选用永磁钢,归于元刷电机的一种,具有结构简略、体积小、易于操控、功用优秀等长处。本文评论的空间矢量操控的永磁同步电机操控器便是选用磁场定向算法并凭借DSP的高速度来完结对转速的实时操控, 因而在各种状况下都有杰出的操控功用,特别适用于对操控器体积
1 导言 跟着Internet和多媒体技能的飞速开展,Internet已由前期的单一数据传输网向多媒体数据(视频、音频、文本等)归纳传输网开展。但Internet供给的仅仅尽力而为的服务,不能满意多媒体运用程序对传输推迟、包丢掉、颤动操控等要求,为了能在传统的IP网上运转多媒体程序,有必要考虑服务质量(Ouality of Service,QoS)。QoS可用推迟、颤动、吞吐量、丢包率等参数来描绘。为了支撑网络的实时传输服务,互联网作业组(Internet Engineering Task Force,IETF)拟定了实时传输协议(Real-time Transport Protocol,RTP)。RTP是专门为交互式音频、视
在现在的许多运用中,要求的额外输入电压超越许多现有DC/DC操控器的VIN最大额外值。对此,传统的解决办法包含运用贵重的前端维护或完结低端栅极驱动器材。这意味着选用阻隔拓扑,如反激式转化器。阻隔拓扑一般需求自定义磁性,且与非阻隔办法比较,规划杂乱性和本钱也有所增加。 存在着另一种解决计划,能够经过运用VIN max(最大输入电压)小于体系输入电压的简易降压操控器来解决问题。这是怎样完结的呢? 降压操控器一般来源于参阅电位(0V)的偏置电源(图1a)。偏置电源来自输入电压;因而,器材需求接受悉数的VIN电位。但是,因为注册P通道金属氧化物半导体场效应晶体管(MOSFET)所需的栅极驱动电压在VGS低于VIN,P通道降压操控器
降压计划 /
描绘: LTC ® 3775 是一款高功率、同步降压型开关 DC/DC 操控器,用于从一个 4.5V 至 38V 的输入电源电压来驱动一个全 N 沟道功率 MOSFET 级。一种获专利的电压前馈补偿电路和一个高带宽差错放大器供给了十分快的电压和负载瞬态呼应。 运用一个 30ns 的低最小接通时刻完结了高降压比,然后供给了极低的占空比。MOSFET R DS(ON) 电流检测最大极限地提升了功率。或许,也能够选用一个检测电阻器以完结较高的电流限值准确度。顶端和底端 MOSFET 两头电压的接连监督完结了电感器电流的逐周期操控 (可运用外部电阻器进行装备)。 软起动功用用于操控发动期间的占空比,然后提
器 /
资源: 1、伺服电机。PWM输出周期在必定范围内,舵机的转向会和PWM的占空比成正比例联系。 2、HCS12的PWM输出。 计划: 1、HCS12中的PWM模块,经过硬件进行PWM输出。 2、HCS12中的ECT的比较输出模块,经过比较输出进行PWM的输出。 鉴于PWM模块为输出PWM专用模块,经过设置相应寄存器即可完结PWM输出,简略便利,并且准确。故选用PWM模块进行PWM输出。 阐明: 1、经过PWM操控舵机的转角,舵机接口一般为3根线,黑色地线,赤色为电源线V两种规范。别的一根线MS即
1 导言 在造纸、印染、纺织等高精度、高转速传动体系中,跟着工业自动化程度的进步和出产规划的扩展,选用单电机驱动往往难以满意出产的要求。而多电机同步操控向来是最中心的问题,对多电机同步和谐操控,国内、外同行也有不少研讨。在实践运用中,多电机的同步功用会因各传动轴的驱动特性不匹配、负载的扰动等要素的影响而恶化,因而同步操控办法的好坏直接影响着体系的牢靠性。 本文经过对的多电机同步传动体系首要操控战略剖析,得出改善的耦合操控是当时比较好的操控思维,实践运用中选用易于完结的PID作为同步补偿操控器算法。但传统PID操控器结构简略、鲁棒性较差且抗扰动才能也不太抱负。因而在操控战略上,选用神经网络操控
近年来,跟着电力电子技能、微电子技能、新式电机操控理论和稀土永磁资料的快速开展,永磁同步电机得以敏捷推广运用。永磁同步电机具有体积小、损耗低、功率高级长处,在节约能源和环境维护日益受到重视的今日,对它的研讨就显得更有必要。 1 永磁同步电机的数学模型 为了便于剖析,在树立数学模型经常疏忽一些影响较小的参数,做如下假定: (1)疏忽电动机铁心的饱满; (2)不计电动机中的涡流和磁滞损耗; (3)定子和转子磁动势所发生的磁场沿定子内圆是按正弦散布的,即疏忽磁场中的一切空间谐波; (4)各相绕组对称,即各相绕组的匝数和电阻相同,各相轴线彼此位移相同的电视点。 在剖析同步电机的数学模型时,常选用坐标改换的办法,
电机调速体系研讨 /
体系 (阮毅)
(张兴,张崇魏)
报名 TI 直播赢【转化器、驱蚊器、保温杯等好礼】|运用低本钱 MSPM0 MCU 快速开发
提交构思【免费赢取600元DIY物料】,参赛冲击【万元大奖】!2023 DigiKey“智造万物,高兴不断”构思大赛报名中
48V体系电池作业温度一般在-40C~75 C之间,一般发动机冷却液无法满意其冷却要求,一般48V体系选用独自风冷办法。因为48V电池安置在轿车后 ...
整车上下电已成为日常用车中的惯例操作。小编从前对这一功用的了解来自电影,但在成为轿车电子工程师后才发现实际中车辆防盗认证等要素约束 ...
现在,国内轿车驾驭辅佐体系操控器之间通讯。大多选用操控器局域网络(CAN)总线协议或带灵敏可变数据波特率的操控器局域网络(CAN-FD ...
近来,禾赛科技的技能专家代表我国参加了在英国伦敦举行的世界规范化安排路途车辆委员会电气、电子部件及通用体系分技能委员会 (ISO TC22 ...
进入2023年国内自动驾驭已经卷城市导航辅佐驾驭卷了很长一段时刻,但是城市的功用真实体会过的用户我敢说仍旧少得能够疏忽不计,究其原因, ...

STM32入门学习之GPIO(STM32F030F4P6依据CooCox IDE)(一)
有奖直播【怎样在几分钟之内完结高效牢靠的USB PD电源规划——PI Expert分步教程】(9:30开端进场)
不行错失的一次邂逅,TTI携TE传感器样片与你相见!免费样片请求活动开端啦~
瑞萨电子推翻传统理念的嵌入式开发渠道 Renesas Synergy 评价套件震慑来袭!答题即可免费请求!
模电怎样学?TI帮你定制课程清单!体会“模电选课测验”功用,赢精彩好礼
站点相关:嵌入式处理器嵌入式操作体系开发相关FPGA/DSP总线与接口数据处理消费电子工业电子轿车电子其他技能存储技能归纳资讯论坛电子百科
联系我们
地址:深圳市龙岗新平北路109号
座机:0755-32925236
传真:0755-32925236
总经理:18802689138
